Информация предоставлена исключительно в образовательных целях.
Администратор сайта не несет ответственности за возможные последствия использования предоставленной информации.
Плату Arduino можно использовать в импульсном металлодетекторе (Pulse Induction Metal Detector (PI)) и как генератор импульсов, так и для обработки и отображения результатов.
Подробнее о принципах работы аналогового импульсного металлодетектора можно прочитать здесь.
Мой импульсный металлодетектор на Arduino - проект FoxyPI
версия 1 (FoxyPI v1) (устаревшая)
Что нового: первая версия.
Лицензия исходного кода скетча: GNU General Public License v3.0, доступен на Github в репозитарии https://github.com/Dreamy16101976/foxyPIv1.
версия 2 (FoxyPI v2) (устаревшая)
Что нового:
- добавлено усреднение анализируемой длительности импульса катушки по алгоритму "скользящего среднего" (moving average, MA);
- добавлена возможность настройки длительности импульсов, интервалов между ними, времени задержки и ширины окна скользящего среднего с помощью меню, а также сохранение настроек в EEPROM;
- добавлено изменение тональности сигнала при изменении длительности импульса катушки;
- добавлен динамический режим работы металлодетектора;
- модифицирован драйвер MOSFET;
- объединены переключатели "+5 В" и "+12 В", а освободившийся переключтель использован для управления подсветкой LCD-экрана;
- добавлены светодиоды для индикации уровня сигнала.
Лицензия исходного кода скетча: проприетарная.

Hex-файл прошивки FoxyPI (версия 2.11) для Arduino Nano 3.0 - FoxyPIv2_11.ino.eightanaloginputs.hex.
Как прошить hex-файл в плату Arduino, я описал здесь.
Схема металлодетектора (версия 2) :
версия 3 (FoxyPI v3)
Что нового в версии 3.8:
- улучшено отображение кривых сигнала в тестовом режиме (посредством более раннего считывания заданных настроек, в том числе контрастности)
Что нового в версии 3.7:
- выполнена небольшая оптимизация кода для повышения надежности металлодетектора;
- добавлена звуковая индикация ошибок ERR 01 и ERR 02
Что нового в версии 3.6:
- добавлена возможность настройки защитного интервала с помощью пункта GUARD сервисного меню;
- добавлена автоподстройка уровней 1 и 2 визуальной индикации в статическом режиме;
- интегрирован тестовый режим (для активации необходимо после включения удерживать кнопку управления до появления графика кривой сигнала)
Что нового в версии 3.5:
- добавлена возможность настройки контраста дисплея с помощью пункта CONTRAST сервисного меню
Что нового в версии 3.4:
- исключен перегрев MOSFET-а;
- повышена стабильность работы;
- добавлена автонастройка интервала между сэмплами АЦП;
- добавлено отображение кривой сигнала после автобалансировки
Что нового в версии 3.3:
- для определения уровня сигнала используется не компаратор, как в предыдущей версии, а АЦП Arduino;
- два режима поиска - динамический и статический (переключение между режимами по долгому нажатию на кнопку);
- для повышения стабильности используется интегрирование сигнала;
- выполняется эмуляция интегратора и фильтра высоких частот;
- изменены пункты меню;
- удержание кнопки при включении вызывает вход в меню настроек;
- нажатие кнопки запускает/останавливает балансировку;
- используются два уровня аудио- и визуальной индикации вместо четырех.
 Дискриминация мишеней в этой версии отсутствует.
Дискриминация мишеней в этой версии отсутствует.
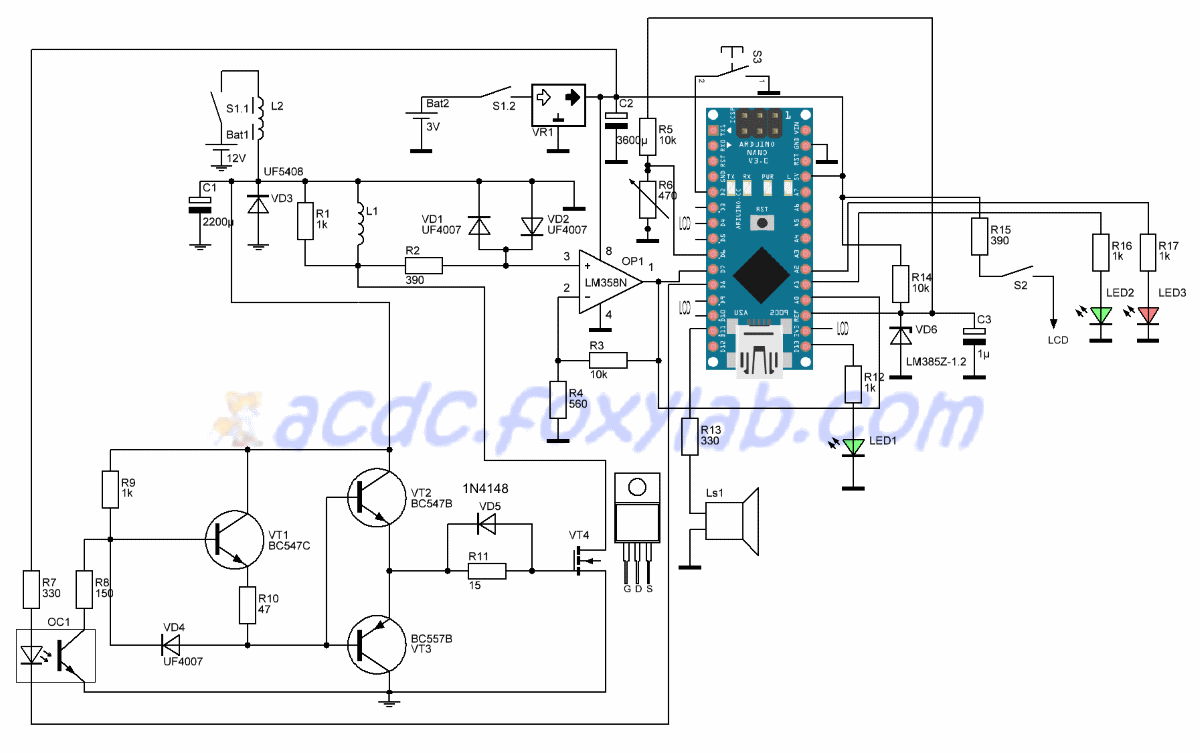
Схема металлодетектора (версия 3, mk II) :
- исключаются элементы, связанные с использованием компаратора - R5, R6;
- для повышения коэффициента усиления ОУ изменен номинал резистора R3 на 320 кОм (составлен из двух резисторов номиналами 220 кОм и 100 кОм);
- изменена схема питания микроконтроллера;
- mk II - изменено подключение подсветки дисплея, изменена батарея питания
В схеме металлодетектора две изолированные друг от друга "земли" - аналоговая (значок заземления  ) и цифровая (значок корпуса
) и цифровая (значок корпуса  ).
).
Лицензия исходного кода скетча: проприетарная.
версия 3.8
Hex-файл прошивки FoxyPI (версия 3.8 от 11.10.2020) для Arduino Nano 3.0 - FoxyPIv3_8.ino.eightanaloginputs.hex
Elf-файл прошивки FoxyPI (версия 3.8 от 11.10.2020) для Arduino Nano 3.0 - FoxyPIv3_8.ino.elf
версия 3.7
Hex-файл прошивки FoxyPI (версия 3.7 от 05.07.2020) для Arduino Nano 3.0 - FoxyPIv3_7.ino.eightanaloginputs.hex
Elf-файл прошивки FoxyPI (версия 3.7 от 05.07.2020) для Arduino Nano 3.0 - FoxyPIv3_7.ino.elf
версия 3.6
Hex-файл прошивки FoxyPI (версия 3.6 от 28.06.2020) для Arduino Nano 3.0 - FoxyPIv3_6.ino.eightanaloginputs.hex
Elf-файл прошивки FoxyPI (версия 3.6 от 28.06.2020) для Arduino Nano 3.0 - FoxyPIv3_6.ino.elf
версия 3.5
Hex-файл прошивки FoxyPI (версия 3.5 от 11.11.2019) для Arduino Nano 3.0 - FoxyPIv3_5.ino.eightanaloginputs.hex
Elf-файл прошивки FoxyPI (версия 3.5 от 11.11.2019) для Arduino Nano 3.0 - FoxyPIv3_5.ino.elf
версия 3.4
Hex-файл прошивки FoxyPI (версия 3.4 от 25.09.2019) для Arduino Nano 3.0 - FoxyPIv3_4.ino.eightanaloginputs.hex
Elf-файл прошивки FoxyPI (версия 3.4 от 25.09.2019) для Arduino Nano 3.0 - FoxyPIv3_4.ino.elf
Как прошить hex-файл в плату Arduino, я описал здесь.
Внешний вид электронного блока (пластик, версия корпуса 1):

вид сверху:
1 - LCD-экран
2 - светодиод
3 - пьезодинамик
4 - кнопка управления
5 - выключатель подсветки LCD-экрана
6 - выключатель питания
7 - светодиоды индикации уровня сигнала
8 - переключатель измерения напряжений батарей
9 - светодиодный индикатор напряжения батарей
Внешний вид электронного блока (картон 1,5 мм, версия корпуса 3):
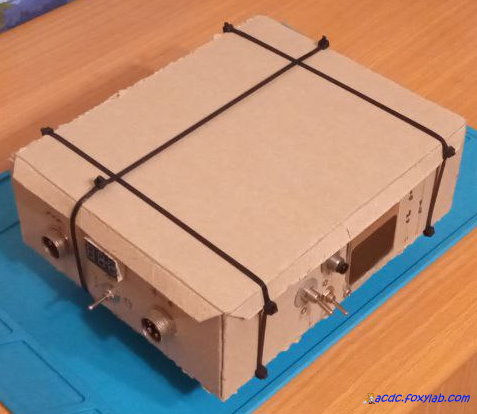
Металлодетектор транспортируется разобранным на три части - блоки электроники и питания с ручкой, штанга, катушка с проводом:

Внешний вид собранного металлодетектора:

Эксплуатация металлодетектора
Включение и запуск металлодетектора
При включении питания металлодетектора (выключателя 6) сначала запускается отсчет:
Настройка металлодетектора
Если при включении удерживать нажатой кнопку (4) до начала отсчета, то затем происходит вход в меню, позволяющее изменить настройки металлодетектора.
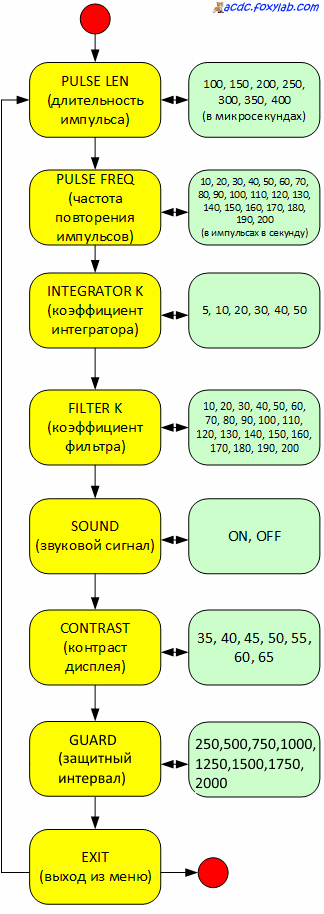
Структура сервисного меню (выделены значения настроек по умолчанию):
- PULSE LEN - длина импульса (100/150/200/250 us)
- PULSE FREQ - частота следования импульсов (10/20/30/40/50/60/70/80/90/100 pps)
- INTEGRATOR K - коэффициент интегратора (5/10/20/30/40/50)
- FILTER K - коэффициент фильтра (10/20/30/40/50/60/70/80/90/100/110/120/130/140/150/160/170/180/190/200)
- SOUND - звук (ON/OFF)
- CONTRAST - величина контраста дисплея (35/40/45/50/55/60/65)
при недостаточном контрасте символы на дисплее слабо различимы, при чрезмерном контрасте экран залит темным фоном:
- GUARD - защитный интервал (250/500/750/1000/1250/1500/1750/2000)
- EXIT - выход из меню
Для перехода между пунктами меню требуется короткое нажатие кнопки (4) (при этом загорается зеленый светодиод), а для выбора пункта меню - длинное нажатие кнопки (4) (при этом загорается красный светодиод):
Для перехода между значениями параметра для выбранного пункта меню требуется короткое нажатие кнопки (4) (при этом загорается зеленый светодиод), а для выбора значения параметра - длинное нажатие кнопки (4) (при этом загорается красный светодиод):
Для выхода из меню и сохранения настроек в EEPROM следует выбрать пункт "EXIT":
После завершения отсчета на дисплее (1) отображается сообщение с обозначением устройства и номером версии программного обеспечения ("FoxyPI v3.x"), логотипом, а из пьезодинамика (3) звучит звуковой сигнал с изменяющейся тональностью, соответствующий различным уровням сигнала и сопровождающийся миганием светодиодов:
Проверка с помощью мультиметра
Для проверки работоспособности металлодетектора можно подключить вместо катушки тестер в режиме измерения постоянного напряжения. На долю секунды после включения детектора вольтметр покажет напряжение питания силовой части (MOSFET открыт), затем напряжение падает до нуля, и после окончания инициализации с началом генерирования импульсов показания составят доли вольта (например, 0,25 В).
При измерении сопротивления на разъеме для катушки (при отключенном питании детектора) показания будут равны сопротивлению демпфирующего резистора (1000 Ом).
Тестовый режим
Для включения тестового режима с прошивкой версии 3.6 и новее необходимо удерживать кнопку и после начала отсчета до появления графика кривой сигнала.
При использовании старых прошивок для тестирования металлодетектора пможно загрузить в Arduino тестовую прошивку:
Hex-файл тестовой прошивки FoxyPI (версия 3.T от 08.01.2020) для Arduino Nano 3.0 - FoxyPIv3_TST.ino.eightanaloginputs.hex
Elf-файл тестовой прошивки FoxyPI (версия 3.T от 08.01.2020) для Arduino Nano 3.0 - FoxyPIv3_TST.ino.elf
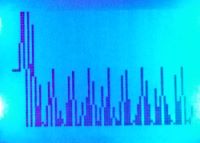
В тестовом режиме металлодетектор после включения генерирует в поисковой катушке импульс тока длительностью 150 мкс, а затем регистрирует и отображает на экране принятый сигнал. При нажатии кнопки генерируется новый импульс и т.д.
Примеры сигналов:
1 - без мишени, 2, 3, 4 - при приближении массивной мишени:

Для массивной мишени из цветного металла (1) спад сигнала более быстрый (меньше постоянная времени), чем для мишени из черного металла (2):

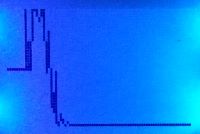
При отключенной катушке кривая имеет вид:

Помехи
Сильные помехи на работу металлодетектора оказывают работающие вблизи электронные устройства:
Вот как выглядит в тестовом режиме помеха от расположенного рядом с катушкой работающего LCD-телевизора:
Это - помехи от работающего TFT-монитора:

А так проявляется помеха от включенной компактной люминесцентной лампы:
Помехи от магнитного поля включенного в сеть трансформатора проявляются в виде трели - очень частых срабатываний:
При эксплуатации прибор должен находиться на удалении от работающих телевизоров, компьютеров, силовых трансформаторов, КЛЛ!
Обнаружение мишеней с помощью металлодетектора
Затем, если не выбран вход в меню, отображаются текущие настройки прибора:
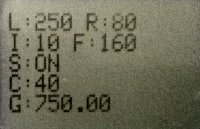
L - длительность импульса (мкс)
R - частота следования импульсов (имп./с)
I - коэффициент интегратора
F - коэффициент фильтра
S - звук (вкл/выкл, ON/OFF)
C - величина контраста дисплея
G - защитный интервал
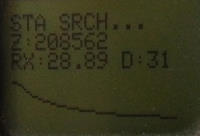
Затем выполняется балансировка (zeroing) в статическом режиме:
HEATING - установление стационарного режима интегратора
ZEROING - обновление "нулевого" уровня
Металлодетектор работает в двух режимах:
- статический режим (static/non-motion mode) (по умолчанию) - учитывается уровень сигнала, не требует постоянного перемещения катушки (может использоваться как для уточнения расположения мишени (pinpointing), так и как основной режим поиска);
- динамический режим (dynamic/motion mode) - учитывается динамика изменения сигнала, в процессе поиска катушку необходимо перемещать над поверхностью грунта
При балансировке желательно перемещать катушку (аналогично действиям при поиске - это особенно важно при балансировке в динамическом режиме). Необходимо выполнять автобалансировку над чистым участком грунта (не над мишенью), не содержащем минералы. О мешающем влиянии грунта на импульсный металлодетектор Вы можете прочитать здесь.
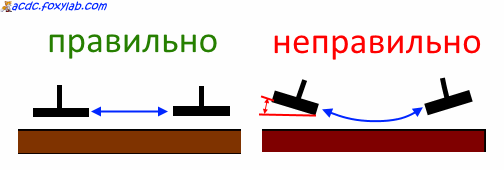
Важно стараться перемещать (sweep) катушку параллельно поверхности земли, иначе из-за влияния магнитного поля Земли на катушке будет наводиться некоторое напряжение (EFE - earth field effect), которое может вызвать появление ложных сигналов: даже просто при перемещении катушки над землей:
При неправильном перемещении поисковой катушки изменяется магнитный поток $\Phi$ через нее:
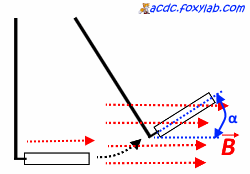
Это объясняется тем, что магнитный поток определяется выражением:
$\Phi = {B \, S \, sin \, \alpha}$, где $B$ - индукция магнитного поля Земли, $S$ - площадь сечения катушки, $\alpha$ - угол между плоскостью катушки и направлением силовых линий магнитного поля Земли.
На приведенном рисунке в первом положении катушки магнитный поток равен нулю, а при перемещении приобретает ненулевое значение. Из-за изменения магнитного потока через катушку в ней согласно закону электромагнитной индукции наводится ЭДС, которая искажает принимаемый сигнал.
В процессе автобалансировки устанавливается оптимальная начальная задержка и длительность анализируемого сигнала, а также оценивается динамика сигнала (в динамическом режиме) или уровень сигнала (в статическом режиме), при этом обновление "нулевого" уровня сопровождается коротким звуковым сигналом.
При прекращении обновления "нулевого" уровня балансировку нужно остановить нажатием кнопки (4).
Также балансировку можно запустить/остановить и в процессе работы нажатием кнопки (4). После окончания автобалансировки подается короткий звуковой сигнал и отображается "нулевое" значение (максимальное, в условных единицах).
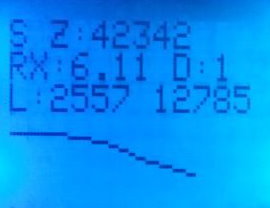
После этого запускается основной цикл работы металлодетектора, при этом на экране отображаются его параметры:
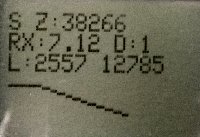
S - текущий режим (S - статический, D - динамический, переключение между режимами выполняется долгим нажатием кнопки (4))
Z:124508 - значение "нулевого" уровня, заданное при балансировке (для статического режима типичные значения 120 000 - 125 000, при изменении длительности импульса от 150 до 250 мкс меняется незначительно; для динамического режима при аккуратном перемещении катушки в процессе балансировки 800 - 1400 )
RX:18.43 - начальная и конечная точки (диапазон) анализируемого сигнала (типичные значения - 16...43, , при изменении длительности импульса от 150 до 250 мкс меняются незначительно)
D:1 - величина задержки между сэмплами (по умолчанию - 1, дополнительная задержка вносится для увеличения временного окна с целью охвата всего сигнала)
L:2557 12785 - уровни 1 и 2 аудиовизуальной индикации
При балансировке вблизи катушки не должно находиться металлических предметов, иначе чувствительность металлодетектора окажется занижена. Вот, например, результаты балансировки при нахождении вблизи катушки гантели:
При отключенной катушке результаты балансировки примерно такие:
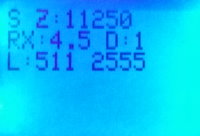
RX при этом бывает либо 2.3 либо 4.5.
При обрыве катушки выдается сообщение ERR 01.
При обнаружении металлического объекта-"мишени" звучит звуковой сигнал изменяющейся тональности и загорается зеленый светодиод (2), а также зеленый либо красный светодиоды (7). Характер аудиовизуальной индикации меняется в соответствии с динамикой (в динамическом режиме) или уровнем (в статическом режиме) регистрируемого RX-импульса:
| Светодиоды |
Статический режим |
Динамический режим |
 |
нет мишени |
нет мишени |
 |
слабый уровень сигнала |
уровень сигнала уменьшается |
 |
средний уровень сигнала |
уровень сигнала увеличивается |
 |
сильный уровень сигнала |
- |
При поиске в динамическом режиме после обнаружения необходимо перемещать катушку вдоль взаимно перпендикулярных направлений - мишень будет находиться вблизи точек смены тональности сигнала (это также позволит отсеять ложные срабатывания, вызванные неаккуратным перемещением катушки).
Возможные сообщения об ошибках при работе металлодетектора
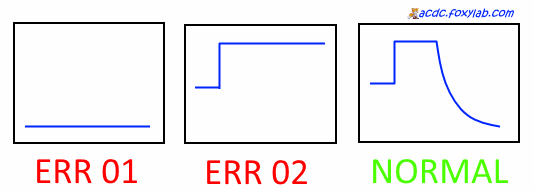
ERR 01 - в сигнале не найден участок насыщения (возможно как при слишком сильном, так и при слишком слабом сигнале)
ERR 02 - участок насыщения длится до конца исследуемого сигнала (сигнал слишком сильный)
Испытания металлодетектора
Испытания металлодетектора я провожу на расчищенной земляной площадке:

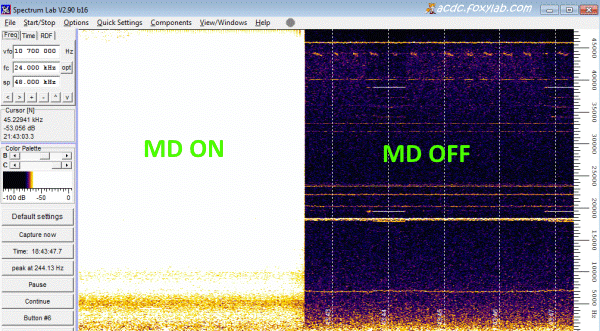
В качестве детектора работы устройства можно использовать средневолновый радиоприемник с магнитной антенной - при направлении оси антенны на плоскость катушки в динамике приемника слышно гудение.
Работающий металлодетектор даже на расстоянии 6 метров полностью подавляет мой сверхдлинноволновый радиоприемник:
Мишени
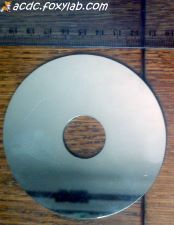
Для испытаний используются различные мишени:

1 - алюминиевая пластина из "винчестера" (жесткого диска) (толщина 1,3 мм, внешний диаметр 3,75 дюйма, диаметр отверсия 1 дюйм)
2 - российская монета достоинством 5 рублей из меди, плакированной мельхиором (диаметр 25 мм, масса 6,45 грамма)
3 - золотое колечко
Дальности обнаружения мишеней "в воздухе":
| Мишень |
Дальность обнаружения
в статическом режиме, см |
Дальность обнаружения
в динамическом режиме, см |
| 1 |
>33 |
>27 |
| 2 |
>15 |
>12 |
| 3 |
>9 |
>9 |
Любопытно, что при наложении друг на друга двух пластин (мишеней 1) дальность обнаружения снижается!
При снижении напряжения батареи дальность обнаружения заметно снижается:
В зарубежных металлодетекторах в качестве тестовой мишени часто используется монета Великобритании 10 пенсов - 10p диаметром 24,5 мм, которая ранее (до января 2012 года) изготавливалась из медно-никелевого сплава (медь 75 %, никель 25 %):

Аналог такой монеты - монета США 25 центов - 25 US cent (U.S. quarter) диаметром 24,26 мм толщиной 1,75 мм массой 5,67 грамма:

Заявленная глубина обнаружения таких монет для различных металлодетекторов (max. depth for a US quarter):
Altai Treasure Seeker 2 hobby metal detector - 15 см;
Prestige Metal Detector - 16 см;
Supereye S3000 Metal Detector - 18 см;
EE Treasure Hunter - 20 см.
Дальности обнаружения массивных мишеней в статическом режиме:
| Мишень |
Дальность, см |
| гантеля 6 кг |
>50 |
| металлические ворота гаража |
>100 |
Изделия из порошкового железа и многие ферритовые детали (1) металлодетектор не обнаруживает, но некоторые изделия из феррита (2) детектируются внутри катушки на расстоянии нескольких см от обмотки:

При быстром перемещении ферритового магнита внутри катушки возникают ложные срабатывания:

Величина защитного интервала (параметр GUARD) влияет на дальность обнаружения мишеней и возможность ложных срабатываний.
Вот, например, как изменяется дальность обнаружения золотого колечка:
| GUARD |
L, см |
| 500 |
12 |
| 750 |
10 |
| 1000 |
8 |
| 1500 |
7 |
При уменьшении параметра GUARD ниже 500 возможно появление ложных срабатываний.
Проверка стабильности работы
Для проверки стабильности работы я включил металлодетектор, расположив его горизонтально и неподвижно. Затем я поднес к нему пластину от жесткого диска (примерно по центру катушки) и зафиксировал расстояние, на котором детектор отреагировал на пластину. Затем я оставил детектор включенным на некоторое время. По истечении этого времени я заново определил расстояние, на котором металлодетектор "чувствовал" пластину. Изменение этого расстояния свидетельствует о степени стабильности работы прибора.
| Время, минуты |
Расстояние обнаружения, см |
Изменение расстояния, см / % |
| 0 |
30 |
0 / 0 |
| 15 |
29 |
-1 / -3,3 |
| 20 |
28 |
-2 / -6,6 |
| 35 |
27 |
-3 / -10 |
Стабильность оказалась вполне удовлетворительной - за 35 минут дальность обнаружения сократилась лишь на 10 %.
Также я повторил тест стабильности с мишенью - алюминиевым радиатором от чипсета:

| Время, минуты |
Расстояние обнаружения, см |
Изменение расстояния, см / % |
| 0 |
14 |
0 / 0 |
| 5 |
13,7 |
-0,3 / -2,1 |
| 10 |
13,6 |
-0,4 / -2,9 |
| 15 |
13,5 |
-0,5 / -3,6 |
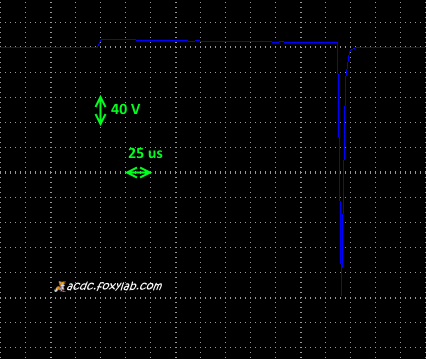
Осциллограммы
Используя лабораторный стенд, как цифровой осциллограф, я снял ряд осциллограмм:
лабораторный стенд -

напряжение на поисковой катушке -
Устройство металлодетектора
Конструктивное исполнение
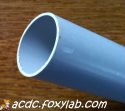
Штанга
Для штанги металлодетектора я использовал ПВХ-трубу диаметром 25 мм с толщиной стенок 1,6 мм (PN16):
Рукоятка
Рукоятка металлодетектора крепится к трубе, на которой закреплены электронный блок и блок питания, с помощью компрессионного фитинга:

Электронный блок
В качестве корпуса электронного блока металлодетектора я использовал распределительную коробку Tyco со степенью защиты IP55 (от воды и пыли) из ПВХ c десятью вводами диаметром 30 мм.
Вид внутри электронного блока (версия корпуса 1):

Внутренности электронного блока (версия корпуса 2):
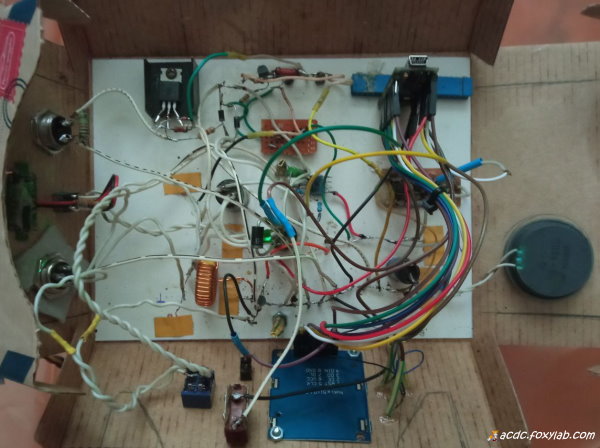
Внутренности электронного блока (версия корпуса 3):
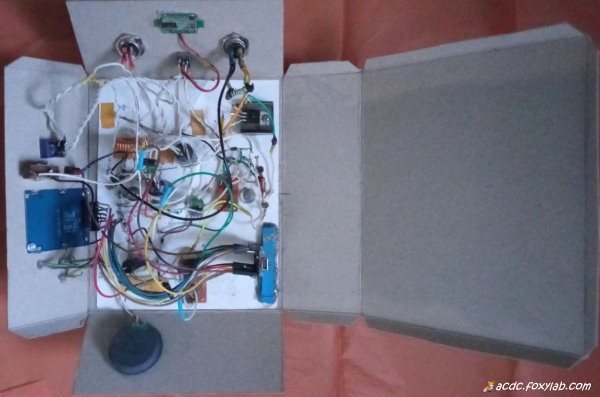
На ПВХ-трубе электронный блок закрепляется посредством U-образных держателей, которые фиксируются нейлоновыми стяжками:

Блок питания
Для размещения элементов питания я использую распределительную коробку. На ПВХ-трубе блок питания закрепляется посредством U-образных держателей, которые фиксируются нейлоновыми стяжками.
Электроника
Микроконтроллер
Я использую плату Arduino Nano 3.0.
Arduino Nano 3-й версии основана на 8-битном AVR микроконтроллере ATmega328P (32 кБайт Flash, 2 кБайт SRAM, 1 кБайт EEPROM, 3 таймера) (2-й версии - на ATmega168), причем буква "P" обозначает "picoPower".

контакты Arduino:
| вывод Arduino |
назначение |
| D08 |
выход сигнала генератора импульсов в катушке |
| D13 |
выход для подключения светодиода |
| D11 |
выход для подключения пьезодинамика |
| A00 |
вход АЦП - для ограниченного и усиленного сигнала с поисковой катушки |
| A01 |
выход для подключения зеленого светодиода |
| A02 |
выход для подключения красного светодиода |
| D02 |
вход подключения кнопки |
| REF |
вход опорного напряжения для АЦП |
ресурсы Arduino:
| ресурс Arduino |
назначение |
| таймер Timer1 |
управление MOSFET |
| таймер Timer2 |
вывод звука |
| канал АЦП 0 |
измерение напряжения сигнала на выходе ОУ |
Для сопряжения с USB-портом в моей плате Arduino используется микросхема преобразователя CH340G.
Источники питания
Питание микроконтроллера
Для питания Arduino я использую два соединенных последовательно литий-ионных аккумулятора UltraFire ZX 18650 емкостью 4200 мА·ч каждый:

Напряжение холостого хода такого полностью заряженного аккумулятора составляет 4,21 В, а на нагрузке 10 Ом через 1 минуту работы - 3,61 В.
Для заряда аккумуляторов я использую доработанное зарядное устройство:

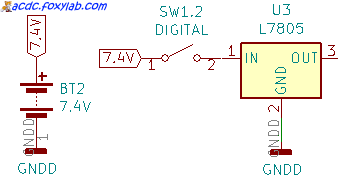
Номинальное напряжение такой батареи составляет 7,4 В.
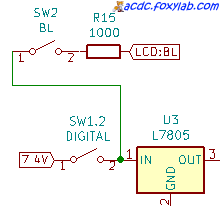
Напряжение батареи 7,4 В преобразуется в напряжение 5 В для питания платы Arduino с помощью интегрального стабилизатора 78L05 (на схеме обозначен U3):
Питание силовой части
Первоначально я использовал в качестве источника питания силовой части 10 щелочных батарей размера AA (LR6). Номинальное напряжение такой батареи составляет 15 В.
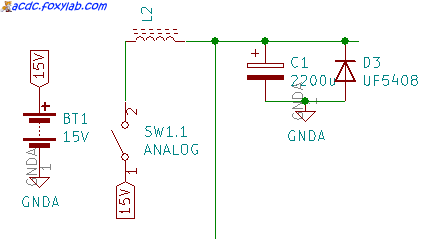
Затем я применил для питания силовой части батарею из трех последовательно соединенных литий-ионных аккумуляторов:

Номинальное напряжение такой батареи составляет 11,1 В.
Катушка L2 предназначена для снижения броска тока при включении устройства (конденсатор C1 при этом разряжен и в начальный момент времени эквивалентен перемычке) и снижения помех, вызванных импульсами тока поисковой катушки. Диод D3 шунтирует батарею питания для отрицательных выбросов напряжения, возникающих на индуктивности поисковой катушки, и защищает от неправильной полярности батареи питания. Конденсатор C1 большой емкости является накопителем энергии - играет важную роль при генерации импульсов тока в катушке.
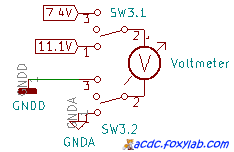
Для подключения источников питания используется четырехконтактный 16 мм "авиа"-разъем GX 16 4 на боковой стороне корпуса электронного блока:

1 - "+" батареи 15/11.1 В
2 - "-" батареи 15/11.1 В
3 - "-" батареи 7,4 В
4 - "+" батареи 7,4 В
Для измерения напряжения батарей питания я подключил через двухполюсный переключатель с фиксацией в нейтральном положении ("D" - измерение напряжения батареи питания микроконтроллера, "A" - измерение напряжения батареи питания силовой части) цифровой светодиодный вольтметр:

Для подключения зарядного устройства я разместил на нижней стороне модуля питания разъем D-Sub DB-9:

Три контакта верхнего ряда служат для зарядки аккумуляторов питания микроконтроллера, а четыре контакта нижнего ряда - аккумуляторов питания силовой части.
Катушка Mk II
Параметры катушки
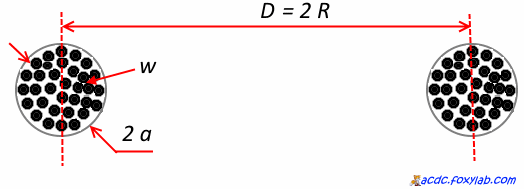
Поисковая катушка со средним диаметром $D$ = 25 см (средний радиус $R$ = 12,5 см) и радиусом сечения катушки $a$ = 0,29 см содержит $w$ = 27 витков эмалированного медного (удельное сопротивление $\rho$ = 0,0175 Ом·мм2/м) провода диаметром $d$ = 0,7 мм (радиус провода $r$ = 0,35 мм,площадь сечения провода $S$ = 0,385 мм2):

Предполагаемое сопротивление катушки $R = {\rho {{\pi D w} \over {S}}}$ = 0,964 Ом, а измеренное составило $R$ = 1,3 Ом:

Для вычисления индуктивности такой катушки существует несколько формул.
приближенная формула:
$L = {{w^2}{{\mu}_0}R[{ln({{8R} \over a})}-2]}$ ,
где $a$ - радиус сечения катушки.
Эта формула приведена в книге [F. W. Grover, Inductance Calculations: Working Formulas and Tables, New York: Dover, 1946].
Для моей катушки:
$L$ = 440 мкГн.
более точная формула:
$L = {{{\mu}_0} \over {4 \pi}} {w^2} D \Phi $, где $\Phi$ - вспомогательный коэффициент:
$\Phi = {2 \pi [{(1 + {{{\gamma}^2} \over 2} )} {ln ({4 \over \gamma})} - 1,75 + {{{\gamma} ^2} \over 6} ] } $, где $\gamma = {a \over D}$, $a$ - радиус сечения катушки
Эта формула используется в плагине multiloop для программы Coil32 (http://coil32.net/multi-winding-round-loop.html) для расчета индуктивности многовитковой круглой катушки с круговым сечением (англ. multi-winding round loop with round cross-section).
Для моей катушки:
$\gamma$ = 0,0116;
$\Phi$ = 25,7;
$L$ = 468 мкГн.
интегральная формула:
$L = {{\mu}_0} {w^2} {\pi} R {{\int_0^{1-{a \over R}}} B_{rel}({\rho}) {\rho} \, {d{\rho}} } $,
где $B_{rel}({\rho}) = { {1 \over \pi} {\int_0^{\pi}} {{1 - {{\rho} cos {\phi} }} \over {{(1+{{\rho}^2}-2{\rho}cos{\phi})}^{3 \over 2}}} \, d{\phi} }$ - относительная магнитная индукция в плоскости катушки на расстоянии ${\rho} \over R$ по сравнению с индукцией в центре катушки, $a$ - радиус сечения катушки
Магнитное поле катушки
При протекании по такой катушке тока $I$ в точке на оси катушки, находящейся на расстоянии $z$ от плоскости катушки, создается магнитное поле, напряженность которого определяется известным выражением:
$H = {w {I \over 2} {{R^2} \over {{(R^2 + z^2)}^{3 \over 2}}}}$
Если принять внутреннее сопротивление одной батарейки как 0,3 Ом, ЭДС - 1,45 В, то для десяти батареек общая ЭДС $E$ составит 14,5 В, а общее сопротивление $R$ цепи с учетом сопротивления поисковой катушки 1 Ом составит 4 Ом. Принимая индуктивность катушки, равной 450 мкГн, получаем, что за длительность $T$ импульса, равную 150 мкс, ток в катушке достигнет значения ${E \over R} (1 - e^{-{T R}\over L}) = 2,7 А$.]
Металлодетектор оказался непривередливым к катушкам - для интереса я подключил катушку из сложенной втрое петли размагничивания от старого телевизора:
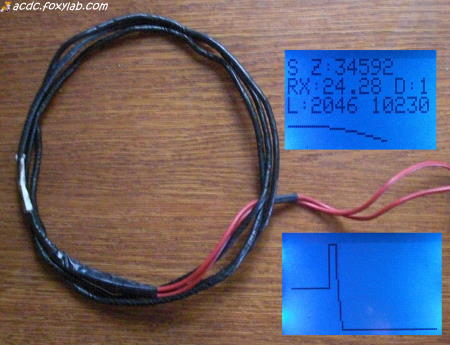
Омическое сопротивление такой петли составляет 18,2 Ом.
На этом фото показаны параметры балансировки и вид кривой сигнала при нахождении мишени вблизи катушки. Как видно, прибор вполне работоспособен и с такой катушкой, хотя чувствительность хуже, чем при "стандартной" катушке.
Катушка Mk III
Также я испытал катушку, созданную для "ручной" версии аналогового металлодетектора .

Для крепления этой катушки к штанге я применил такой адаптер:

Применение этой катушки повысило чувствительность к мелким мишеням - золотое колечко обнаруживается на расстоянии 13 см! Вот какие параметры настройки получились для этой катушки:
Катушка Mk IV
Еще более высокую чувствительность к мелким мишеням показала катушка Mk IV, сделанная из катушки Mk II, сложенной вдвое.
Конструкция катушки
Для защиты катушки можно использовать гофрированный шланг для электропроводки (обычно серого цвета) который разрезается вдоль:

В него вставляется катушка, а затем он скрепляется изоляционной лентой. Катушка закрепляется в монтажной коробке с помощью термоклея и нейлоновых стяжек.
Катушка закрепляется на штанге с помощью компрессионного фитинга, резьбовая часть которого вкручена в полипропиленовую трубку диаметром 26 мм, закрепленную на крышке монтажной коробки:

Для закрепления полипропиленовой трубки я использовал нейлоновые стяжки и способ, заключающийся в совместном использовании пищевой соды и "суперклея" на основе цианоакрилата:

Вдоль линии соприкосновения деталей наносится суперклей, посыпается содой, затем сода смачивается суперклеем, поверх повторно наносится сода, которая тоже смачивается клеем. Реакция экзотермическая - клеевой слой нагревается. В результате образуется монолитный слой, надежно скрепляющий детали.
Для подключения катушки используется двухконтактный 16 мм "авиа"-разъем GX 16 2 на боковой стороне корпуса:



( "16" означает диаметр посадочного отверстия в мм; разъем выдерживает максимальное напряжение 1500 В и рассчитан на 500 коммутаций).
Генератор
Для выдачи импульсов я использую цифровой вывод D08, установив его как "выход" (цифровой вывод D08 соответствует выводу PB0 микроконтроллера ATmega) .
Для ускорения я использую не команду digitalWrite, а прямую запись в порт, что быстрее примерно в 10 раз!
Соответствие цифровых выводов Arduino и выводов портов ATmega
| цифровой вывод Arduino |
вывод порта ATmega |
| D00 |
PD0 |
| D01 |
PD1 |
| D02 |
PD2 |
| D03 |
PD3 |
| D04 |
PD4 |
| D05 |
PD5 |
| D06 |
PD6 |
| D07 |
PD7 |
| D08 |
PB0 |
| D09 |
PB1 |
| D10 |
PB2 |
| D11 |
PB3 |
| D12 |
PB4 |
| D13 |
PB5 |
Временные параметры генератора задаются через меню настроек при включении прибора.
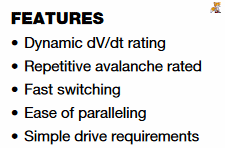
Силовая часть
Так как напряжение на MOSFET-е при его выключении резко возрастает (из-за индуктивности катушки), то транзистор может перейти в режим лавинного пробоя ("avalanche breakdown"). Это происходит, если напряжение "сток-исток" $V_{DS}$ на MOSFET-е превышает его напряжение пробоя $V_{DS (BR)}$.
Для современных транзисторов работа в этом режиме является штатной (они маркируются как "Repetitive Avalanche Rated" или "100% AVALANCHE TESTED"). При этом важно учитывать такие лавинные характеристики транзистора как максимальный повторяющийся лавинный ток $I_{AR}$ и максимальная энергия повторяющегося лавинного пробоя $E_{AR}$.
Необходимо, чтобы максимальный ток в катушке перед выключением не превышал значения $I_{AR}$, а максимальная энергия, запасенная в катушке, не превышала значения $E_{AR}$. Энергия магнитного поля катушки определяется как ${E_M} = {{{L {I^2}} \over {2}}}$ (например, для катушки индуктивностью $L$ = 700 мкГн с током $I$ = 3 А энергия составит 3,2 мДж).
Параметры некоторых MOSFET:
| Наименование |
$V_{DS (BR)}$, В |
$I_{AR}$, А |
$E_{AR}$, мДж |
| IRF540 |
100 |
28 |
15 |
| IRF740 |
400 |
10 |
13 |
| IRF840 |
500 |
8 |
13 |
| FQP12N60C |
600 |
12 |
22,5 |
Я использую MOSFET IRF840, обладающий подходящими характеристиками:
Цоколевка IRF840:
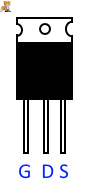
G - затвор, D - сток, S - исток
При лавинном пробое транзистора затухающий ток катушки проходит по участку "сток-исток MOSFET-а - батарея питания", обладающему малым сопротивлением, что приводит к замедлению затухания тока.
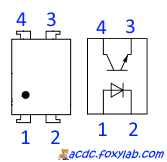
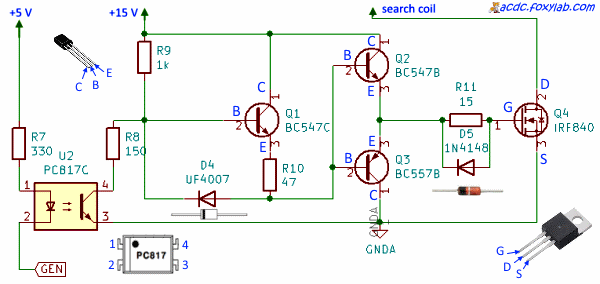
драйвер MOSFET
Управление MOSFET осуществляется с помощью оптопары PC817C (обладает быстродействием 3...4 мкс, выдерживает выходной ток 50 мА и напряжение в закрытом состоянии до 35 В) и дискретной транзисторной схемы:
цоколевка PC817:
цоколевка BC547/BC557:

C - коллектор, B - база, E - эмиттер
Подобный драйвер был описан в статье http://radiohlam.ru/raznoe/driver_polevikov.htm (сейчас эта ссылка не работает, а статью можно посмотреть в архиве - http://web.archive.org/web/20151209032140/http://radiohlam.ru/raznoe/driver_polevikov.htm).
При логической "единице" на выходе Arduino происходит гашение светодиода оптопары U2, закрывается ее транзистор, из-за чего повышается потенциал базы транзистора Q1, и он открывается, что приводит к открытию транзистора Q2 и закрытию транзистора Q3. В результате повышается потенциал затвора MOSFET-а Q4 и он открывается, пропуская ток через катушку.
Я исследовал характеристики такого драйвера (при подаче на светодиод оптодрайвера напряжения 5 В через резистор 470 Ом):
ток потребления во "включенном" состоянии (MOSFET открыт) очень мал, в "выключенном" (MOSFET закрыт) - меняется от 5,8 до 12 мА при росте напряжения питания от 7 до 15 В; напряжение на выходе драйвера составляет 12,15 / 1,83 В ("вкл"/"выкл") при напряжении питания 13 В.
Детектор
В основе работы импульсного металлодетектора лежит принцип электромагнитной индукции - Electromagnetic Pulse Induction (EMI).
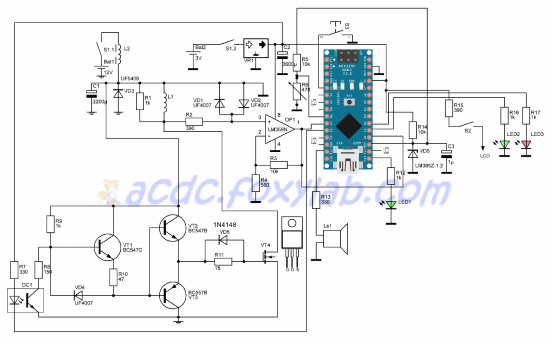
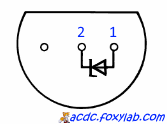
Схема детектора моего металлоискателя:
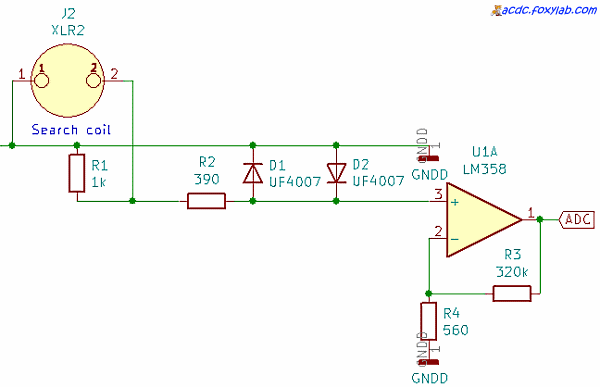
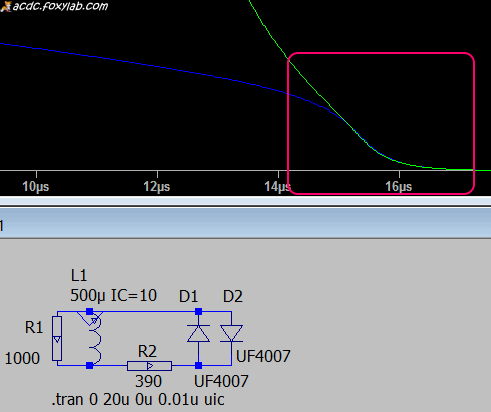
Сигнал с поисковой катушки, подключенной к разъему J2, через токоограничивающий резистор R2 поступает на включенные встречно-параллельно диоды D1 и D2, ограничивающие величину сигнала до ~ 1 В. Это ограничение не вносит заметной погрешности, так как для детектирования "мишени" имееет значение "хвостик" сигнала, напряжение на котором составляет малые доли вольта (вплоть до милливольт) - подтверждено моделированием:
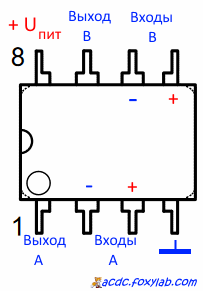
Такой слабый сигнал для надежного детектирования необходимо усилить, для чего я использовал операционный усилитель U1 LM358N, включенный по традиционной схеме неинвертирующего усилителя. Коэффициент усиления определяется выражением $1+ {R3 \over R4}$, при указанных номиналах элементов он составляет 570.
Особенностью ОУ LMx58 является возможность однополярного питания (single supply) - в отличие от, например, LM318, LF356, LF357 не требуется источник отрицательного напряжения.
Цоколевка LM358N (N - в DIP-корпусе):
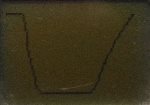
Вид сигнала на выходе ОУ:
Для обработки сигнала с поисковой катушки я использую встроенный в микроконтроллер ATmega аналого-цифровой преобразователь.
На опорный вход АЦП VREF подается опорное напряжение uref, равное 1,235 В, которое берется с эталонного источника LM385Z-1.2 (используется режим работы АЦП EXTERNAL).
Цоколевка LM385Z:
На сигнальный вход АЦП ADC In подается усиленное операционным усилителем напряжение сигнала с поисковой катушки, ограниченное диодами D1 и D2. АЦП дискретизирует сигнал с катушки в виде последовательности чисел (fast-time signal) со значениями 0 (минимальный уровень, 0 В)...1023 (максимальный уровень uref).
Наличие мишени вблизи катушки проявляется следующим образом:
(1023 - уровень сигнала, соответствующий перегрузке АЦП)
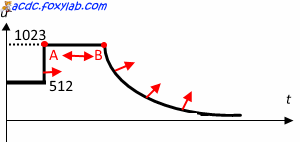
- смещение точки A вправо;
- увеличение интервала A-B;
- смещение кривой вверх.
Сравните этот график сигнала с приведенным выше:
Для определения наличия мишени выполняется вычисление суммы (slow-time signal) заданного числа дискретизированных уровней сигнала, расположенных на одинаковых интервалах друг от друга, во временном "окне" (evaluation window). При этом значения, расположенные ранее заданной при балансировке начальной точки, не учитываются (для повышения чувствительности).
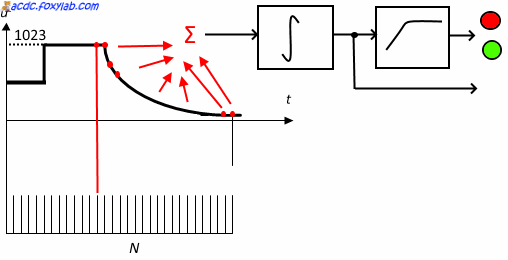
Затем выполняется интегрирование последовательности получаемых суммарных значений (интегратор эмулируется программно). Параметром фильтра является коэффициент $K$, который равен числу импульсов, приходящихся на постоянную времени интегратора.
Уровень сигнала на выходе интегратора анализируется в статическом режиме работы металлодетектора.
При работе металлодетектора в динамическом режиме результаты интегрирования дополнительно проходят через фильтр высоких частот (high-pass filter, HPF), который эмулируется программно. Параметром фильтра является коэффициент $K$, который показывает, во сколько раз частота следования импульсов больше частоты среза фильтра.
На выходе фильтра получается сигнал, характеризующий динамику изменения RX-сигнала.
При превышении выходным сигналом порога - "нулевого" уровня, заданного при балансировке, срабатывает триггер - мишень считается обнаруженной и реализуется аудиовизуальная индикация.
Звуковая индикация
Я использую для звуковой индикации пьезоэлемент от автономного пожарного извещателя. Громкость звучания пьезоэлемента весьма причудливым образом зависит от частоты сигнала. Я смог найти набор частот 900 (самый слабый сигнал) )- 1000 - 1100 (самый сильный сигнал), для которых громкость звучания увеличивается. Для управления звучанием пьезоэлемента, подключенного к контакту 11 платы, я используют таймер 2 Arduino.
Беззвучный режим (только светодиодная индикация) может быть активирован через меню настроек при влючении прибора.
Визуальная индикация
Для индикации я использую LCD-дисплей от мобильного телефона Nokia 5110:
Дисплей для этого телефона - монохромный c разрешением 84×48:
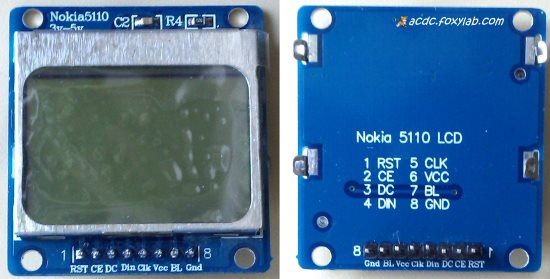
Контроллер дисплея - Philips PCD8544.
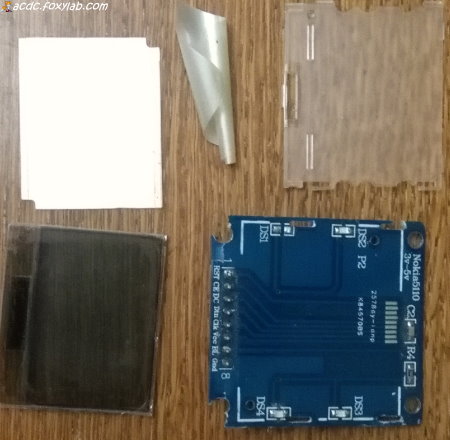
Вот как выглядит такой дисплей в разобранном виде:
Подключение дисплея:
| Вывод дисплея |
Вывод Arduino |
Назначение вывода дисплея |
|---|
| RST |
D10 |
сброс контроллера дисплея |
| CE (или CS) |
D09 |
разрешение ввода данных в контроллер дисплея |
| DC |
D05 |
режим ввода - данные/команды |
| Din |
D04 |
данные шины SPI |
| CLK (или SCLK) |
D03 |
команды шины SPI |
| VCC |
* |
напряжение питания (2,7 ... 3,3 В) |
| BL |
** |
подсветка |
| GND |
GND |
"земля" |
Существует два варианта дисплея LCD 5110 - с синим (именно такой я использую) или красным текстолитом:


* напряжения питания контроллера -
синий - строго 3,3 В (можно подключить к выводу 3V3 Arduino)
красный - по некоторым непроверенным сведениям выдерживает напряжение питания 5 В (можно питать от выводов 5V или 3V3 Arduino)
** напряжение питания подсветки -
синий - на вывод подсветки можно подать напряжение 3,3 или 5 В
красный - на вывод подсветки подключается "земля" (?)
Проблемой такого дисплея является ненадежный контакт ЖК-панели с печатной платой посредством соединителя ZEBRA, который устраняется, например, припаиванием проводника, прижимающего панель к плате - как рекомендовано здесь:

Если эту проблему не устранить, то она приводит к "почернению" экрана, требующей повторной инициализации.
Для работы с таким дисплеем в Arduino я использую библиотеку Adafruit-PCD8544 от Adafruit Industries (сайт компании - https://www.adafruit.com).
"Adafruit invests time and resources providing this open source code, please support Adafruit and open-source hardware by purchasing products from Adafruit!"
Выключатель SW2 (5) управляет подсветкой экрана:
При хорошем внешнем освещении подсветку дисплея можно не использовать, так как она потребляет заметную мощность.
Дискриминация мишеней
Вихревые токи затухают из-за наличия электрического сопротивления у "мишени". Это затухание описывается экспоненциальным законом $i = k H_0 {e^{ {-t} \over \tau}}$. Коэффициент $k$ определяется формой и размерами "мишени". Постоянная времени $\tau = {L G} = {L \over R}$, определяющая длительность протекания вихревых токов, определяется электрической проводимостью материала мишени $G$ (или сопротивлением $R$) и ее индуктивностью $L$.
В таблице я привел относительную электрическую проводимость различных материалов по отношению к золоту:
| Материал |
серебро Ag |
медь Cu |
золото Au |
алюминий Al |
железо Fe |
платина Pt |
| Отн. проводимость |
1,5 |
1,4 |
1 |
0,86 |
0,24 |
0,23 |
Вихревые токи применяются для исследования свойств материалов посредством измерения электрической проводимости, так как материалы имеют уникальное значение проводимости в зависимости от их состава и способа изготовления. В качестве стандарта используется при этом значение проводимости химически чистой меди при температуре 20 ºC - стандарт International Annealed Copper Standard (IACS) - удельное сопротивление 1,7241x10-8 Ом·м или 5,8001x107 См/м (100% IACS). Железо, например, имеет значение проводимости, равное 18% от проводимости меди.
Как утверждается (например, в статье исследователя Reg Sniff), мишени из золота или из тонкой фольги имеют очень малую постоянную времени и вихревые токи в них быстро затухают, в отличие от мишеней из железа, меди или серебра.
Начальная напряженность магнитного поля $H_0$ определяется начальным током в катушке и уменьшается по кубическому закону $1 \over {h^3}$ при удалении от катушки. Величина напряженности магнитного поля $H_0$ вдоль оси катушки на расстоянии $z$ от ее центра, создаваемого током $I_0$, определяется выражением: ${H_0} = { {w {R^2} {I_0}} \over {2 { {({R^2}+{z^2})}^{3 \over 2} } } }$.
Вихревые токи создают собственное затухающее магнитное поле, которое наводит экспоненциально затухающее (с той же постоянной времени $\tau$) напряжение в поисковой катушке. Величина этого напряжения уменьшается как шестая степень расстояния $1 \over {h^6}$ при удалении "мишени" от катушки. Это приводит к удлинению импульса напряжения на поисковой катушке, что и регистрируется металлодетектором.
Дополнительный анализ кривой сигнала (напряжения на поисковой катушке) может быть выполнен с целью дискриминации (выделения разных типов) мишеней. Наклон кривой в ее начале можно оценить отношением $K = {{x_t} \over {x_{t+{\Delta}t}}}$ величин выборок, отделенных, например, пятью интервалами (${\Delta}t=5$). При этом постоянная времени определяется выражением: ${\tau} = {{{\Delta}t} \over {ln K}}$
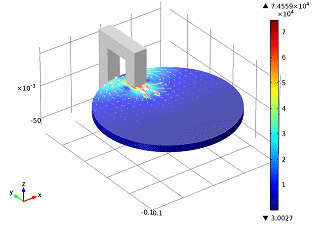
Для иссследования вихревых токов могут использоваться программные пакеты для моделирования электромагнитных процессов. В качестве примера можно привести моделирование электромагнитного тормоза на вихревых токах в пакете COMSOL Multiphysics (описание - https://www.comsol.com/blogs/simulating-eddy-current-brakes/):
Существуют отрицательные мнения по поводу возможности эффективной дискриминации для импульсных металлодекторов.
"The most reliable discriminator is you, by digging the target!" (http://www.gold-prospecting-wa.com) - "Самый надежный дискриминатор - это вы, при выкапывании мишени".
В книге "Subsurface Sensing" авторов Ahmet S. Turk, Koksal A. Hocaoglu, Alexey A. Vertiy
приведены следующие утверждения:
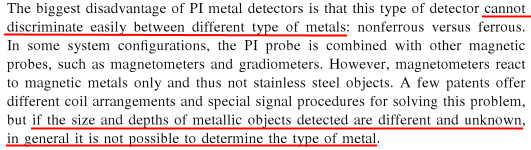
"Важнейшим недостатком импульсных металлодетекторов является невозможность лёгкой дискриминации между различными типами металлов. ... Если размеры и глубина детектируемых металлических объектов различны и неизвестны, то в общем случае невозможно определить тип металла".
В качестве примера импульсного металлодетектора, для которого заявлена возможность дискриминации (ферромагнитные (FERROUS)/неферромагнитные (N-FERROUS) материалы), можно привести модель PULSE STAR II.
Особенности дискриминации в таком детекторе:
- возможна только для мишеней не менее 10 см в диаметре (в отличие от VLF/TR-детекторов, которые обладают способностью дискриминации даже для маленьких объектов);
- объекты меньшего размера отображаются как ферромагнитные;
- несколько маленьких неферромагнитных объектов отображаются как один большой ферромагнитный.