Проект находится на этапе активной разработки, информация может быть неполной!
Среди всех возможных радиоуправляемых моделей аэролодка привлекает легкостью построения - не требуется делать управляемые колеса и механизм передачи крутящего момента как на автомобиле, сложные поверхности и управление как на самолете, гидроизоляцию и редуктор для привода гребного винта как на надводной и подводной обычной лодке...
Движение аэролодке придают один или несколько двигателей с движителями - воздушными винтами (пропеллерами).
Следует заметить, что такие движители применяются и в других моделях:
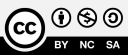
на аэромобилях:
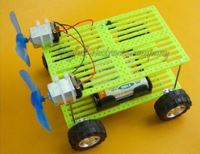
на аэросанях (рекорд скорости для моделей аэросаней составил 164 км/ч!):
В качестве альтернативных движителей, использующих воздушный поток, можно упомянуть движители на эффекте Магнуса и винтопарусные движители.
Существует несколько вариантов конструкции аэролодки:
- один тяговый двигатель с пропеллером и один либо два воздушных руля ;
- один тяговый двигатель с пропеллером и водный руль;
- два тяговых двигателя с пропеллерами;
- один тяговый двигатель и два рулевых двигателя с пропеллерами.
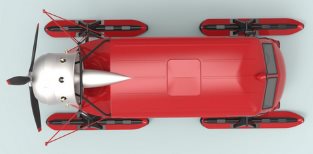
Примеры лодок:
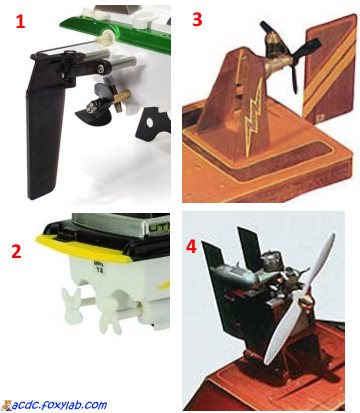
- с гребным винтом и водным рулем;
- с двумя гребными винтами;
- с воздушными пропеллером и воздушным рулем;
- с двумя воздушными винтами.
Наиболее популярны аэролодки с воздушными рулями (этот способ управления применяется на современных аэролодках):
Элементы аэролодки:
- воздушный пропеллер;
- тяговый двигатель;
- воздушный руль;
- двигатель управления рулем.
Пример такого проекта -
RC boat with NRF24L01+ and Arduino (автор - Markus Gritsch):
http://dangerousprototypes.com/forum/viewtopic.php?f=56&t=8509&p=65113#p65113
В проекте использована связка Arduino и NRF24L01+ для PWM-управления двигателем и сервоприводом поворота рулей.
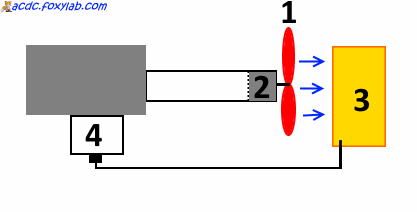
Реже используется схема аэролодки с водным рулем (этот способ применялся на ранних аэролодках):
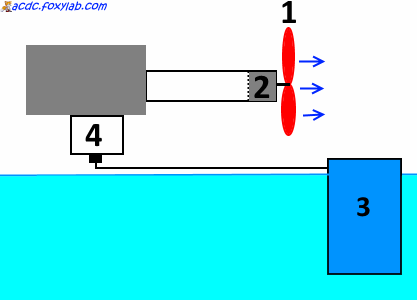
Элементы аэролодки:
- воздушный пропеллер;
- тяговый двигатель;
- водный руль;
- двигатель управления рулем.
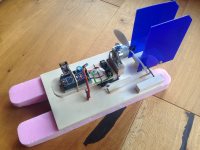
Я применил именно эту схему для постройки своей дистанционно управляемой аэролодки.

Плавучесть
Моя лодка имеет имеет плоское днище (англ. jon boat).

Водоизмещение судна равно массе (массовое водоизмещение) или объему (объемное водоизмещение) вытесненной подводной частью судна воды, причем масса вытесненной воды равна массе самого судна, а объем - объему его подводной (ниже ватерлинии) части.
Судно наиболее устойчиво в положении оптимального плавания, при котором вес вытесненной воды равен весу судна.
Выталкивающая сила воды приложена в центре плавучести (B), сила тяжести - в центре тяжести (G). Судно находится в устойчивом равновесии, если при отклонении его от положения равновесия возникает момент сил, возвращающий его в исходное положение. Обычно это обеспечивается размещением балласта в нижней части судна - при этом центр тяжести располагается ниже центра плавучести. Но у плоскодонной лодки расчет точки приложения выталкивающей силы при отколонении от положения равновесия оказывается довольно сложным!
Размеры моей аэролодки лодки на уровне ватерлинии:
$L$ - длина = 12 см;
$B$ - ширина = 5,5 см
Отношение длины к ширине ($L \over B$) влияет на ходкость и управляемость лодки - чем оно больше, тем лучше курсовая устойчивость судна, но тем хуже его поворотливость.
Плоскодонная лодка имеет хорошую остойчивость, но ее курсовая устойчивость хуже, чем у килевой лодки. Этот недостаток я компенсировал наличием у лодки водного руля.
Электрическая схема лодки
Электропитание
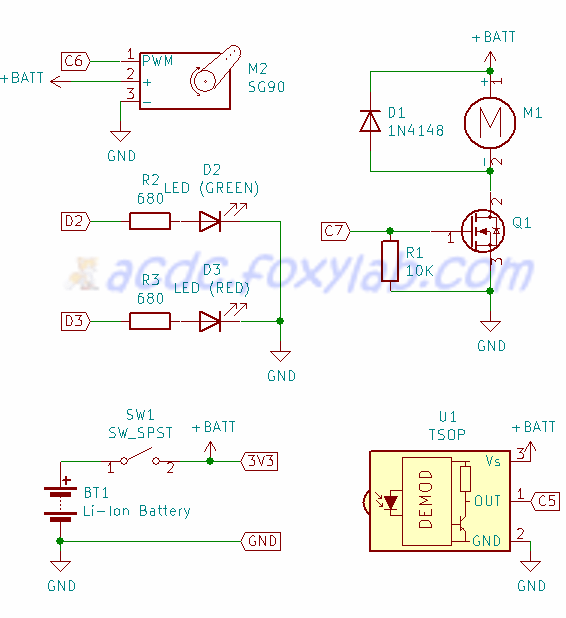
Для электропитания тяговых двигателей и системы управления я использую литий-ионную батарею от мобильного телефона.
Выводы питания выведены на трехконтактный разъем:

- "+" батареи
- "+" питания аэролодки
- "-"
Установка перемычки между контактами 1 и 2 включает питание аэролодки.
Для зарядки батареи зарядное устройство подключается к контактам 1 и 3.
Тяговый двигатель
В качестве тягового двигателя я использовал бессердечниковый (англ. coreless) микродвигатель (номинальная частота вращения 66000 об/мин, номинальное напряжение питания 3,7 В):

Вот как выглядит подобный двигатель в разобранном виде:

Также в подобных моделях используют бесколлекторные (англ. brushless) двигатели.
При подключении красного провода такого двигателя к "+" напряжения питания, а "-" напряжения питания - к черному вал двигателя вращается по часовой стрелке (если смотреть на двигатель со стороны вала).
Затвор MOSFET-а Q1, управляющего двигателем, подключен к выводу С7 микроконтроллера.
Резистор R1 обеспечивает разряд затворной емкости транзистора.
Диод D1 обеспечивает гашение импульсов напряжения самоиндукции.
Пропеллер
Движущая сила аэролодки создается движителем - вращающимся пропеллером, который приводится во вращение тяговым двигателем.
Основные параметры пропеллера:
диаметр $D$ (англ. diameter);
площадь диска пропеллера $A_d$ - площадь круга, ометаемого пропеллером при его вращении:
$A_d = {{\pi {D}^2} \over 4}$
шаг $H$ (англ. pitch) - линейное расстояние по оси пропеллера, которое проходила бы ступица за один полный оборот при вращении в плотной (несжимаемой) среде ("ввинчиваясь" в нее); характеризует угол лопастей, чем он больше, тем больше тяга и сопротивление вращению.
Чем меньше лопастей на пропеллере (две в минимальном случае), тем выше его эффективность. Но увеличение числа лопастей позволяет повысить силу тяги, создаваемую пропеллером.
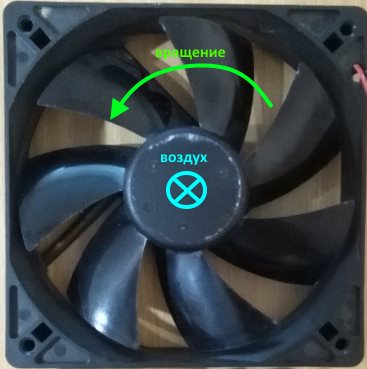
В компьютерных кулерах бывает 5, 7, 9 лопастей:

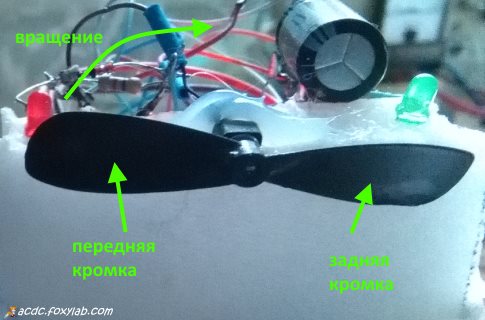
Я использую двухлопастной пропеллер:

Параметры этого пропеллера:
$D$ = 4,6 см;
$A_d$ = 16,6 см2;
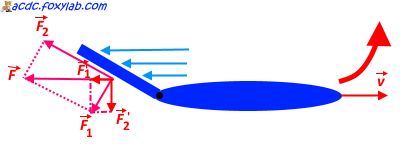
Пропеллер работает как вращающееся крыло, движущееся под углом атаки $\alpha$ со скоростью $v$ в воздухе:
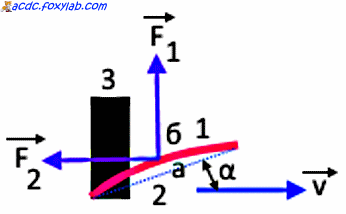
1 - лопасть пропеллера;
а - передняя кромка лопасти;
б - задняя кромка лопасти;
2 - хорда лопасти;
3 - втулка (ступица) пропеллера
Вот пример определения угла атаки лопастей компьютерного кулера:

Лопасть создает подъемную силу $F_1$ (она и является силой тяги аэролодки) при перемещении через воздух - давление над лопастью аэродинамической формы (англ. airfoil) ниже, чем давление под лопастью(возникает разность давлений воздуха ${\Delta}p$). Сила тяги пропеллера определяется произведением этой разности давления на площадь диска пропеллера - $F = {\Delta} p A_d$. Также можно рассматривать силу тяги, как реактивную силу, возникающую при отбрасывании пропеллером некоторой массы воздуха.
Также возникает и сила сопротивления $F_2$, на преодоление которой, как и на создание подъемной силы, и затрачивается мощность, отбираемая от тягового двигателя.
При этом желательно, чтобы подъемная сила была как можно больше, а сила сопротивления - как можно меньше. На это соотношение влияет аэродинамический профиль лопасти пропеллера.
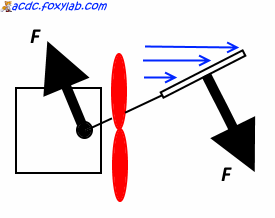
Например, в компьютерном кулере лопасть имеет вогнуто-выпуклый профиль (дает наибольшую подъемную силу), при этом передняя кромка (двигающаяся навстречу воздуху) - вогнутая, а задняя - выпуклая. Лопасти вращаются против часовой стрелки, а воздушный поток направлен к вентилятору (если смотреть с лицевой стороны):
Применяются два вида пропеллеров:
стандартные - тянущие (puller/tractor prop) (1);
толкающие (pusher prop) (2):
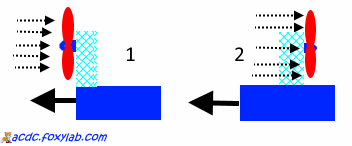
Для движения моей аэролодки пропеллер должен быть толкающим. Он направлен в сторону кормы лодки, в ту же сторону направляется и поток воздуха, а сила тяги направлена за пропеллер.
Так как пропеллер несимметричный, то пропеллер вырабатывает тяговое усилие только при его правильном расположении на оси двигателя:
При этом скорость движения лодки составляет около 10 сантиметров в секунду. Также лодка немного разворачивается в правую сторону, что компенсируется небольшим поворотом водного руля.
При расположении пропеллера противоположной стороной тяга не создается, а лодка лишь поворачивается вокруг своей оси вправо.
Рулевое управление (англ. steering)
Движением аэролодки можно управлять с помощью водного или воздушного руля.
водный руль (англ. water rudder)
Для работы водного руля необходимо перемещение воды относительно его поверхности. В обычной лодке такой руль располагается за винтом, создающим поток воды, воздействующий на руль. Также дополнительное воздействие на руль оказывается из-за перемещения в воде самой лодки.
Предположим, что руль отклонен на некоторый угол (угол атаки) от продольной оси лодки. Пренебрегая подъемной силой, учтем только силу сопротивления со стороны воды $F$. Эта сила может быть разложена на две составляющие - $F_1$ и $F_2$. Сила $F_2$ действует параллельно рулю и не влияет на него. Сила $F_1$ действует перпендикулярно рулю и оказывает на него давление. Эту силу можно разложить на две составляющие - $F_1^{\prime}$ и $F_2^{\prime}$. Сила $F_1^{\prime}$ замедляет движение лодки, а сила $F_2^{\prime}$ действует перпендикулярно направлению движения лодки, заставляя ее поворачиваться.
Для управления движением лодки я использую водный руль в виде пластины (aнгл. blade) размером 5,3 × 3,4 см из тонкого текстолита, закрепленную на рычаге за кормой лодки. Естественно, поверхность такого руля не является аэродинамической, что снижает его эффективность.
воздушный руль (англ. air rudder)
При использовании воздушного руля поток воздуха от пропеллера набегает на отклоненный руль и давление воздуха создает поворачивающий момент:
Лодка при этом разворачивается в ту сторону, в которую отклонен руль.
УПРАВЛЕНИЕ РУЛЕМ:
схема "push-pull"
Обычная схема управления воздушным/водным рулем на (аэро)лодке выглядит так (схема "push-pull"):
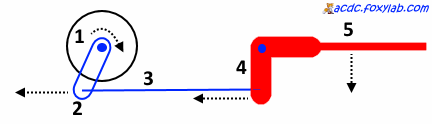
1 - серво(привод) руля (англ. rudder servo);
2 - рычаг (качалка) сервопривода (англ. (servo) single arm);
3 - толкатель руля (англ. rudder push-rod)
4 - румпель (ребро руля) - рычаг для поворачивания руля (англ. rudder arm)
5 - руль (англ. rudder)
В этой схеме при перемещении рычага серво влево он тянет (англ. pull) толкатель, а вправо - толкает (англ. push) его.
схема "pull-pull"
Альтернативой этой схеме является схема "pull-pull", в которой для связи используются тросики:
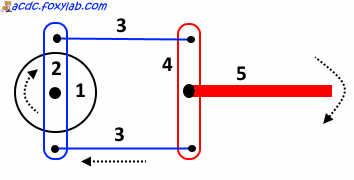
1 - серво(привод) руля (англ. rudder servo);
2 - рычаг сервопривода (англ. (servo) double/full arm);
3 - тросик (англ. cable);
4 - кронштейн (кабанчик) руля (англ. rudder horn, control horn);
5 - руль (англ. rudder)
При перемещении рычага серво он тянет (англ. pull) либо один либо другой тросик. Тросик может быть изготовлен из плетеной лески (англ. Braided Fishing Line), продетой через самодельные проушины, либо рыболовного поводка (англ. Fishing Leader Wire) либо гибкого кабеля (англ. Flexible Cable).
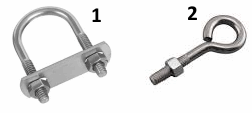
В качестве проушины можно применить, например, небольшой болт-скобу (англ. u-bolt) (1) или рым-болт (англ. eye-bolt) (2):
Возможны два варианта такой схемы - с прямыми (англ. straight) (1) и пересекающимися (англ. crossed) (2) тросиками:
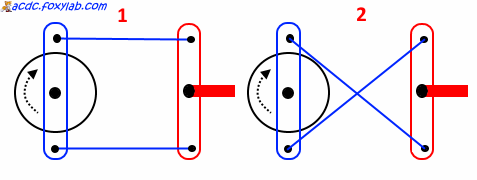
Преимущество схемы (1) в том, что тросики не трутся друг о друга.
Линейные размеры рычага сервопривода и кронштейна руля могут быть различными. Существуют различные мнения по поводу их оптимального соотношения.
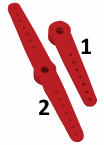
Для работы в этих схемах требуются разные рычаги серво:
одиночный (1) - для схемы "push-pull" и двойной (2) - для схемы "pull-pull":
Также возможен (но применяется весьма редко) непосредственный привод руля напрямую от серво без промежуточных связей.
В своем проекте я для поворота водного руля использую схему "pull-pull" с прямыми тросиками:
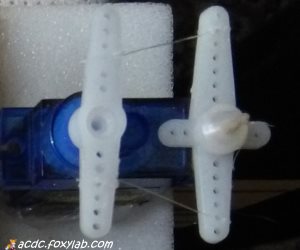
Я использую сервопривод Tower Pro Micro Servo 9 g SG90.
Сервопривод имеет три провода:
| цвет провода |
обозначение |
назначение |
| коричневый |
GND |
"земля" ("-" напряжения питания) |
| красный |
VCC |
"+" напряжения питания (3...7,2 В) |
| оранжевый |
PWM |
ШИМ-управление |
Угол поворота вала сервопривода определяется длительностью импульса (1...2 мс) на входе PWM. Частота импульсов составляет 50 Гц (период следования равен 20 мс). Крутящий момент на валу этого привода составляет 2,5 кг·см.
Вывод PWM сервопривода подключен к выводу С6 микроконтроллера.
Тросики сделаны из рыболовной монолески и закреплены "суперклеем" на рычагах сервопривода.
Руль в трех положениях:

- поворот влево;
- движение прямо;
- поворот вправо
При повороте на новый курс лодка описывает циркуляцию. Диаметр циркуляции моей аэролодки составляет около 140 см.
Микроконтроллер
В качестве "мозга" аэролодки я использую плату с микроконтроллером STM8S103F3P6:
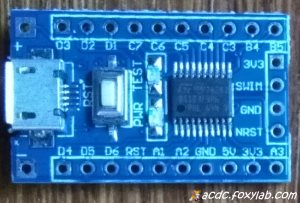
Подробнее о работе с МК семейства STM8 можно прочитать здесь.
Дистанционное управление
Для дистанционного управления я использую инфракрасный диапазон.
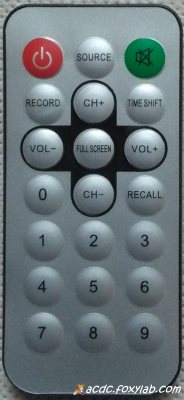
Пульт и приемник - от вышедшего из строя SDR-донгла:
пульт для донгла:
ИК-приемник на плате донгла:

Пульт использует популярный протокол NEC, импульс при этом заполнен несущей частотой 38 кГц.
В этом протоколе при нажатии кнопки пульт посылает сигнал, состоящий из пяти частей:
- преамбула (содержит импульс и паузу)
- адрес (ADDR)
- инвертированный адрес
- код команды (CMD)
- инвертированный код команды (завершается дополнительным импульсом)
Единичный бит содержит импульс и длинную паузу, нулевой бит - импульс и короткую паузу.
При удержании кнопки периодически посылается сигнал повтора - содержит импульс, паузу и завершающий импульс.
Для управления аэролодкой я использую четыре кнопки:
| кнопка |
код команды |
назначение |
| POWER |
0xB2 |
включение/выключение двигателя |
| FS |
0x02 |
центрирование руля |
| VOL - |
0x50 |
поворот руля влево |
| VOL + |
0x78 |
поворот руля вправо |
Приемник имеет три вывода:

| номер вывода |
обозначение вывода |
назначение |
| 1 |
OUT |
выход (данные) |
| 2 |
GND |
"земля" (- напряжения питания) |
| 3 |
VCC |
+ напряжения питания |
Вывод данных OUT подключен к выводу C5 микроконтроллера. На этом выводе присутствует высокий уровень при отсутствии сигнала от пульта, и низкий - при его наличии.
Максимальная дальность действия ИК-управления составляет около 2,5 м.
Альтернативные варианты дистанционного управления:
диапазон 315/433 МГц:
передатчик - приемник : STX882 (выходная мощность до 50 мВт, напряжение питания 2,4 ... 5 В) - SRX882 (супергетеродин)
диапазон 2,4 ГГц:
модуль NRF24L01, подключаемый по шине SPI
Назначение выводов модуля:
| Вывод |
Назначение |
| SCK (Serial ClocK) |
тактирование (синхронизация) |
MOSI / MI
(Master Out Slave In) |
вход данных |
MISO / MO
(Master In Slave Out) |
выход данных |
| CE/SS |
выбор ведомого на шине SPI из нескольких устройств |
| SCN |
выбор режима "прием/передача" |
| IRQ |
выход прерывания1 |
| GND |
"земля" |
| Vcc |
питание модуля 3.3 В2 |
Примечания:
1 вывод IRQ чаще всего не используется, он необходим для немедленной реакции микроконтроллера при приеме нового пакета данных;000
2 для надежной работы паралельно питанию как можно ближе к радиомодулю рекомендуется подключить электролитический конденсатор не менее 100 мкФ, а так же керамический на 0,1 мкФ.
Этот модуль широко используется для дистанционного управления моделями - от лодок до квадрокоптеров. При этом возможны два варианта управляющего блока - либо еще один МК с еще одним модулем, либо заводской пульт радиоуправления (но при этом МК на модели должен реализовать протокол этого пульта (например, протокол Bayang).
Огни
Бортовые огни моей аэролодки представляют собой два светодиода: красного свечения - на левом борту, зеленого свечения - на правом (в соответствии с правилами судоходства :-) ). Светодиоды через балластные резисторы R2 и R3 подключены к выводам микроконтроллера: зеленый диод D2 - к выводу D2, красный диод D3 - к выводу D3.
Оба огня горят при включенном тяговом двигателе, только красный - при левом повороте, только зеленый - при правом.
Прошивка МК
Для подключения к программатору я использую четыре провода, припаянные к плате МК:
| цвет провода |
обозначение вывода |
назначение |
| малиновый |
3V3 |
"+" напряжения питания 3,3 В |
| зеленый |
SWM |
вывод SWIM
("single wire interface module") |
| черный |
GND |
"земля", "-" напряжения питания |
| оранжевый/желтый |
RST |
сброс |
Продолжение следует